




Single photon InGaAs photodetector
With the rapid development of LiDAR, the light detection technology and ranging technology used for automatic vehicle tracking imaging technology also have higher requirements, the sensitivity and time resolution of the detector used in the traditional low light detection technology can not meet the actual needs. Single photon is the smallest energy unit of light, and the detector with the ability of single photon detection is the final tool of low light detection. Compared with InGaAs APD photodetector, single-photon detectors based on InGaAs APD photodetector have higher response speed, sensitivity and efficiency. Therefore, a series of researches on IN-GAAS APD photodetector single photon detectors have been carried out at home and abroad.
Researchers from the University of Milan in Italy first developed a two-dimensional model to simulate the transient behavior of a single photon avalanche photodetector in 1997, and gave numerical simulation results of the transient characteristics of a single photon avalanche photodetector. Then in 2006, the researchers used MOCVD to prepare a planar geometric InGaAs APD photodetector single photon detector, which increased the single-photon detection efficiency to 10% by reducing the reflective layer and enhancing the electric field at the heterogeneous interface. In 2014, by further improving the zinc diffusion conditions and optimizing the vertical structure, the single-photon detector has a higher detection efficiency, up to 30%, and achieves a timing jitter of about 87 ps. In 2016, SANZARO M et al. integrated the InGaAs APD photodetector single-photon detector with a monolithic integrated resistor, designed a compact single-photon counting module based on the detector, and proposed a hybrid quench method that significantly reduced avalanche charge, thereby reducing post-pulse and optical crosstalk, and reducing timing jitter to 70 ps. At the same time, other research groups have also carried out research on InGaAs APD photodetector single photon detector. For example, Princeton Lightwave has designed InGaAs/InPAPD single photon detector with planar structure and put it into commercial use. The Shanghai Institute of Technical Physics tested the single-photon performance of APD photodetector using the removal of zinc deposits and the capacitive balanced gate pulse mode with a dark count of 3.6 × 10 ⁻⁴/ns pulse at a pulse frequency of 1.5 MHz. Joseph P et al. designed the mesa structure InGaAs APD photodetector single photon detector with wider bandgap, and used InGaAsP as the absorbing layer material to obtain a lower dark count without affecting the detection efficiency.
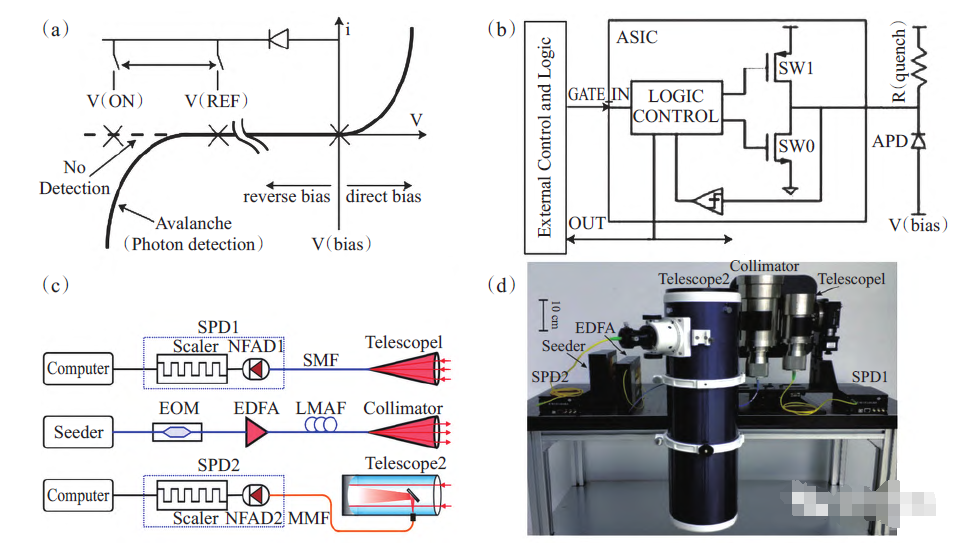
The operating mode of the InGaAs APD photodetector single photon detector is free operation mode, that is, the APD photodetector needs to quench the peripheral circuit after an avalanche occurs, and recover after quenching for a period of time. In order to reduce the impact of quenching delay time, it is roughly divided into two types: One is to use passive or active quenching circuit to achieve quenching, such as the active quenching circuit used by the R Thew, etc. Figure (a), (b) is a simplified diagram of the electronic control and active quenching circuit and its connection with APD photodetector, which has been developed to work in gated or free running mode, significantly reducing the previously unrealized post-pulse problem. Moreover, the detection efficiency at 1550 nm is 10%, and the probability of post-pulse is reduced to less than 1%. The second is to realize fast quenching and recovery by controlling the level of bias voltage. Since it does not depend on the feedback control of avalanche pulse, the delay time of quenching is significantly reduced and the detection efficiency of the detector is improved. For example, L. C. Comandar et al use the gated mode. A gated single-photon detector based on InGaAs/InPAPD was prepared. The single-photon detection efficiency was over 55% at 1550 nm, and the post-pulse probability of 7% was achieved. On this basis, the University of Science and Technology of China established a liDAR system using multi-mode fiber simultaneously coupled with a free-mode InGaAs APD photodetector single-photon detector. The experimental equipment is shown in Figure (c) and (d), and the detection of multi-layer clouds with a height of 12 km is realized with a time resolution of 1 s and a spatial resolution of 15 m.
Post time: May-07-2024